
“Who Wants to be a Self-driving Car?” is a data driven trust exercise that uses augmented reality to help people empathize with self-driving vehicle systems. Together with moovel Lab, we built an unconventional driving machine that uses a virtual reality headset with real-time three dimensional mapping and object recognition to enable drivers to navigate their surroundings.
Data driven trust exercise
The idea of empathizing with a computer
The moovel lab, a Daimler research facility in Stuttgart, is an interdisciplinary team engaged in creative projects with a focus on future issues of mobility and human behavior in urban areas. The moovel lab collaborated with us to prototype a rather unconventional vehicle. To better understand how autonomous vehicles perceive their environment we designed a vehicle where the driver lies almost horizontally at hip level-inside the vehicle, driving only with the help of VR-glasses.
The immersive driving experience is created by visualizing data from multiple sensors located at the top of the chassis and feeding it into the VR-glasses. The project provides a new perspective on the discussion of the world’s ever faster progress towards autonomous mobility and its effect on society and the individual.


The Moovel team are keen to get people thinking about some of the issues and believe making them tangible makes them easier to discuss. They say most of the volunteers who have gone for a ride found it fun—eventually—and informative.
The project, called “Who Wants to Be a Self-Driving Car?” is meant as a way to help humans empathize with autonomous vehicles. It’s also an exercise in trust and transparency.
Eyes of an autonomous car
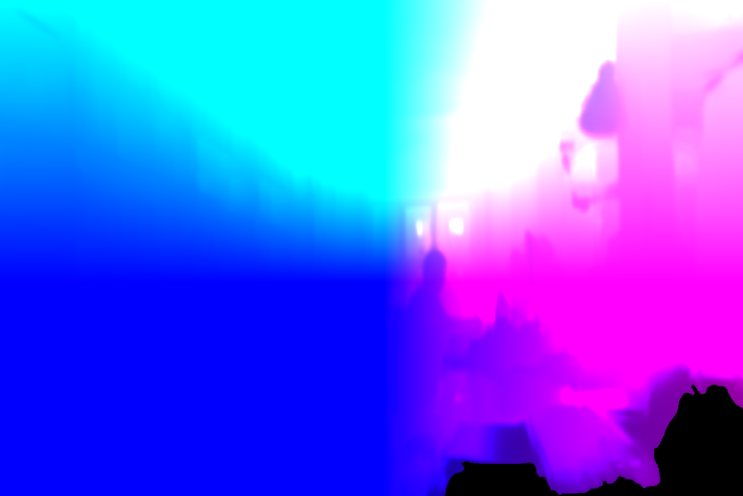
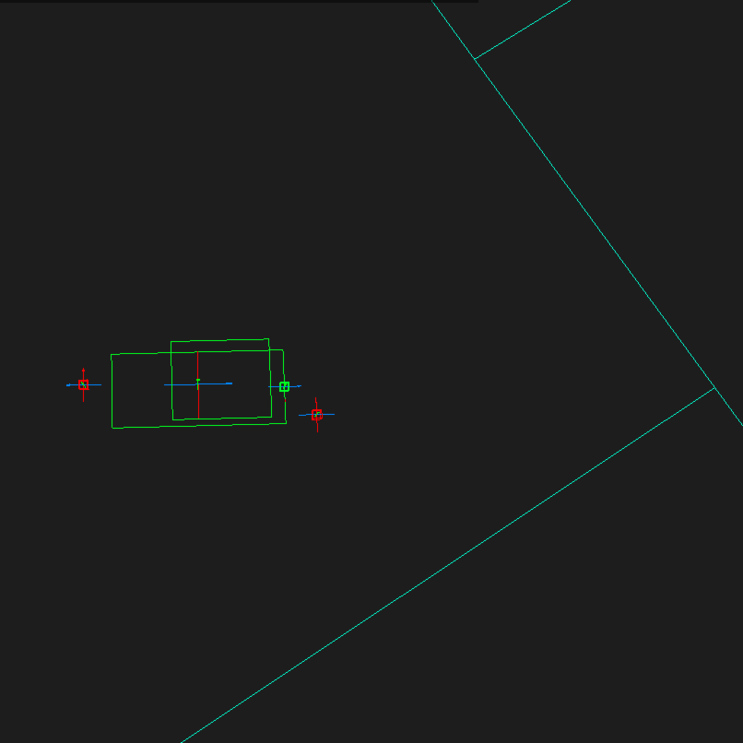
Seeing the world through sensors
The VR headset allows the driver to see the 2K image data from a ZED stereo 3D depth camera which displays the environment of the vehicle in real-time. The 3D environmental mapping is complemented by visual object recognition using the YOLO library of a standard webcam, which assists the driver in comprehending their surroundings properly.


The VR headset allows the driver to see the 2K image data from a ZED stereo 3D depth camera which displays the environment of the vehicle in real-time. The 3D environmental mapping is complemented by visual object recognition using the YOLO library of a standard webcam, which assists the driver in comprehending their surroundings properly.

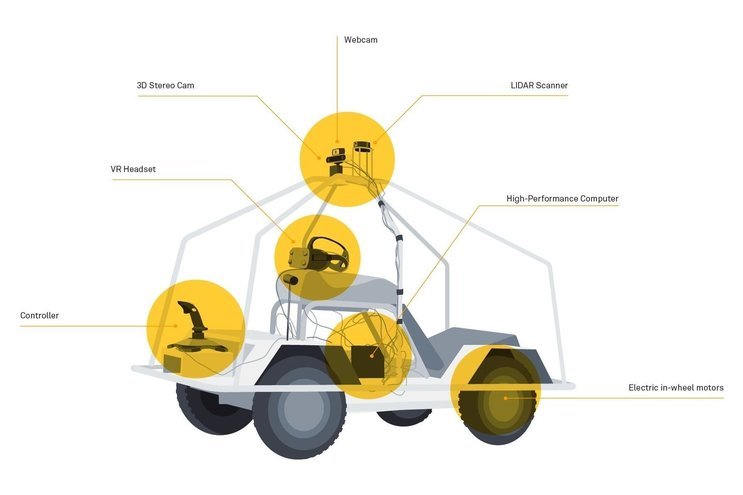
A video camera is mounted on the rear of the vehicle, enabling the driver to remain in control - even in reverse gear.
A LIDAR (Light Detection and Ranging) sensor adds an additional level of distance measurement by sending laser pulses from the sensor to adjacent objects. These various components are all combined in the VR headset, using the software vvvv and the 3D Unity Game Engine.
The underlying technologies of self-driving cars, and therefore the discussions about their strengths and unresolved challenges, are rendered visible in this explorative and immersive experience.

The project was presented at 2017 NODE Forum for Digital Arts in Frankfurt, 2017 Push UX Conference in Munich, and at the 2017 KIKK Festival, Europe’s best-known festival for digital and creative culture in Belgium.
Making Of
behind the scenes



Curious about our approach? Feel free to get in touch!
Sebastian Oschatz Partner +49 69 24 000 321 sebastian.oschatz@meso.design sebastian.oschatz@meso.design +49 69 24 000 321
MESO Digital Interiors GmbH
Gutleutstr. 96 . 60329 Frankfurt . Germany
Team
Theron Burger, Alexander Teczar, Nikos Mechanezidis, Johannes Lemke, Sebastian Kujas, Timon Skerutsch, Urs Hoffmann, Johannes Busch, Daniel Neumayr, Ben Schiek, Julius S.